
Lập trình PWM STM32F4
Hôm nay mình sẽ giới thiệu các bạn lập trình PWM để ứng dụng điều khiển motor DC,BLDC,Servo motor;
Nói đến PWM có thay đổi độ rộng xung duty
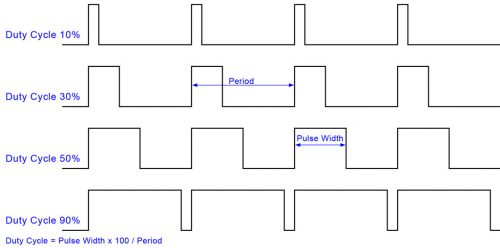
ở đây duty sẽ được thay đổi
Preiod dữ nguyên
Với các ứng dụng điều khiển tần số thì preiod sẽ được thay đổi duty dữ nguyên
ứng dụng trong điều khiển servo motor
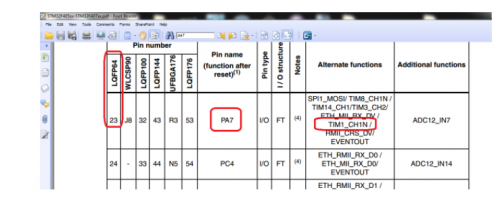
Về phần lập trình với bộ PWM các bạn trước khi thiết kế tham khảo datasheet
Code lập trình
|
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
|
#include “stm32f4xx.h”
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
void TIM_PWM_Configuration(void);
int main(void)
{
TIM_PWM_Configuration();
TIM1->CCR1 = 10 * 65535 / 100; // 10% Duty cycle
TIM1->CCR2 = 50 * 65535 / 100; // 50% Duty cycle
TIM1->CCR3 = 90 * 65535 / 100; // 90% Duty cycle
while (1)
{}
}
void TIM_PWM_Configuration(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA | RCC_AHB1Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource7, GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource0, GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource1, GPIO_AF_TIM1);
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF; //
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_Pulse = 0;
//TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OC2Init(TIM1, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OC3Init(TIM1, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
/* TIM1 enable counter */
TIM_Cmd(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf(“Wrong parameters value: file %s on line %drn”, file, line) */
while (1)
{}
}
|