0 ₫


Cảm biến siêu âm hoạt động Các chế độ thụ thuộc vào chân PS
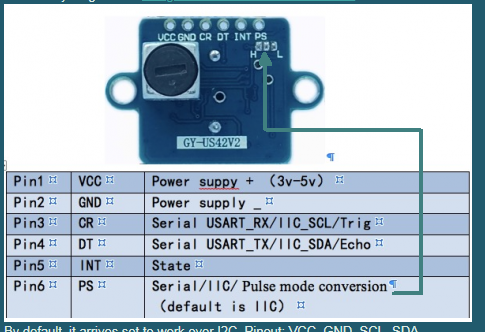
PS Để chống module hoạt động chế độ I2C
PS mức H module hoạt động chế độ UART VCC, GND, RX, TX.
PS mức L module hoạt động chế độ UART VCC, GND, RX, TX.
Chương trình module với Arduino :
/*
PRO MINI———–GYUS42
VCC ———- 5V
GND ——— GND
A5 ——– RC (SCL)
A4 ——– TD (SDA)
*/
#include “Wire.h”
//The Arduino Wire library uses the 7-bit version of the address, so the code example uses 0x70 instead of the 8-bit 0xE0
#define SensorAddress byte(0x70)
//The sensors ranging command has a value of 0x51
#define RangeCommand byte(0x51)
//These are the two commands that need to be sent in sequence to change the sensor address
#define ChangeAddressCommand1 byte(0xAA)
#define ChangeAddressCommand2 byte(0xA5)
int i=0;
void setup() {
Serial.begin(9600); //Open serial connection at 9600 baud
Wire.begin(); pinMode(0, OUTPUT);
// changeAddress(SensorAddress,0x40,0);
}
void loop(){
takeRangeReading(); //Tell the sensor to perform a ranging cycle
delay(100); //Wait for sensor to finish
word range = requestRange(); //Get the range from the sensor
if(range<50)
{
delay(100);
if(range<50)
{
i++;
}
}
Serial.print(“Range: “); Serial.println(range); Serial.print(“CNT: “); Serial.println(i); //Print to the user
// changeAddress(0x70,0x20,0);
}
//Commands the sensor to take a range reading
void takeRangeReading(){
Wire.beginTransmission(SensorAddress); //Start addressing
Wire.write(RangeCommand); //send range command
Wire.endTransmission(); //Stop and do something else now
}
//Returns the last range that the sensor determined in its last ranging cycle in centimeters. Returns 0 if there is no communication.
word requestRange(){
Wire.requestFrom(SensorAddress, byte(2));
if(Wire.available() >= 2){ //Sensor responded with the two bytes
byte HighByte = Wire.read(); //Read the high byte back
byte LowByte = Wire.read(); //Read the low byte back
word range = word(HighByte, LowByte); //Make a 16-bit word out of the two bytes for the range
return range;
}
else {
return word(0); //Else nothing was received, return 0
}
}
/* Commands a sensor at oldAddress to change its address to newAddress
oldAddress must be the 7-bit form of the address that is used by Wire
7BitHuh determines whether newAddress is given as the new 7 bit version or the 8 bit version of the address
If true, if is the 7 bit version, if false, it is the 8 bit version
*/
void changeAddress(byte oldAddress, byte newAddress, boolean SevenBitHuh){
Wire.beginTransmission(oldAddress); //Begin addressing
Wire.write(ChangeAddressCommand1); //Send first change address command
Wire.write(ChangeAddressCommand2); //Send second change address command
byte temp;
if(SevenBitHuh){ temp = newAddress << 1; } //The new address must be written to the sensor
else { temp = newAddress; } //in the 8bit form, so this handles automatic shifting
Wire.write(temp); //Send the new address to change to
Wire.endTransmission();
}
Liên hệ với chúng tôi lấy code STM32F103
Phone:0977948846